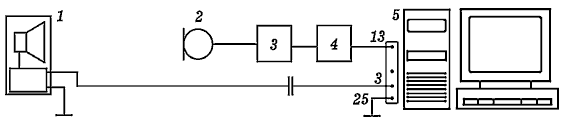
Рассматриваемый метод позволяет измерять координату тела с точностью до 2-5 мм с периодичностью 0,3 -- 1 с, и сохранять результаты в массиве с последующим построением графика. Сущность метода состоит в определении времени распространения звукового импульса от динамика до микрофона, установленного на движущемся теле. Управление динамиком и измерение времени осуществляется с помощью компьютера. 1. Сущность акустического метода измерения координаты. Экспериментальная установка для демонстрации метода определения расстояния от динамика до микрофона по времени распространения звукового импульса изображена на рис. 1. Источником звука является активная колонка 1 подключенная через конденсатор к 3 выводу LPT-порта персонального компьютера (ПК) 9. Напротив нее расположен микрофон 2, соединенный через усилитель 3 с формирователем прямоугольных импульсов 4, выход которого подключен к 13 выводу LPT-порта ПК 5.
При записи в ячейку ОЗУ с адресом 888 числа 2 на 3 выводе LPT-порта появляется логическая 1, динамик вырабатывает звуковой импульс. Практически сразу же запускается цикл 1 в котором в массиве xx[i] сохраняются состояния ячейки ОЗУ с адресом 889 в последовательные моменты времени. Когда звуковой импульс достигает микрофона на выходе формирователя прямоугольных импульсов появляется логическая 1, в результате чего изменяется содержимое ячейки ОЗУ 889. Это также сохраняется в массиве xx[i]. После этого запускается цикл 2, в котором состояние массива xx[i] выводится на экран в текстовом или графическом виде. Оператор delay(100); обеспечивает задержку в 100 мс, после чего осуществляется очистка экрана (оператор cleardevice;). Все это находится в цикле Repeat ... untill KeyPressed; и поэтому повторяется до тех пор, пока не будет нажата клавиша клавиатуры. Алгоритм работы программы:
uses crt,graph; ПРОГРАММА 1
var t,DriverVar, ModeVar, ErrorCode, x, y, k, time, i:integer;
xx : array[1..1200] of integer;
Procedure GraphInit;
begin
DriverVar:=Detect; InitGraph(DriverVar,ModeVar,'c:\bp\bgi');
ErrorCode:=GraphResult; if ErrorCode<>grOK then Halt(1); end;
Begin GraphInit;
repeat {Начало общего цикла}
port[888]:=2; delay(2); port[888]:=0; {Формирование импульса}
for i:=1 to 1200 do xx[i]:=port[889]; {Цикл 1}
for i:=1 to 1200 do begin {Цикл 2}
if xx[i]<120 then xx[i]:=200 else xx[i]:=0;
{ if i/50=round(i/50) then line(i,0,i,480);}
circle(round(i/2),240-xx[i],2); end; {Конец цикла 2}
delay(100); {Задержка}
cleardevice; {Очистка экрана}
until keypressed; {Конец общего цикла}
CloseGraph;
End.
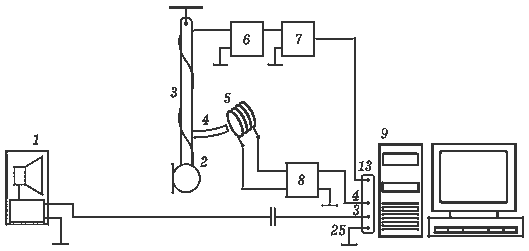
Проведение эксперимента. Соберите установку и запустите программу. Перемещая микрофон относительно динамика, пронаблюдайте смещение импульса на экране монитора. При приближении микрофона к динамику на распространение звука требуется меньшее время, поэтому изображение импульса на экране смещается влево. Обратите внимание на то, что сравнительно небольшие смещения микрофона (2-5 мм) вызывают заметные смещения импульса на экране монитора. 2. Использование акустического метода измерения координаты при изучении механических колебаний. Функциональная схема установки изображена на рис.2. В качестве источника звуковых импульсов применяется одна колонка 1, подключенная через конденсатор к 3 выводу LPT-порта персонального компьютера (ПК) 9. Колебательной системой является физический маятник 3, на конце которого установлен микрофон 2. Сигнал с микрофона поступает через усилитель 6 и формирователь прямоугольного сигнала 7 на 13 вывод LPT--порта компьютера 9. Для возбуждения вынужденных колебаний на маятнике расположен сердечник 4, который входит внутрь обмотки 5, установленной в штативе. Обмотка 5 подключена к устройству управления 8, вход которого соединен с выводом 4 LPT-порта компьютера.
uses crt,graph; ПРОГРАММА 2
const N=1280;
var DriverVar, ModeVar, ErrorCode, x, i, j, s : integer;
y, xx : array[1..N] of integer; k : real; f: text;
Procedure GraphInit;
begin
DriverVar:=Detect; InitGraph(DriverVar,ModeVar,'c:\bp\bgi');
ErrorCode:=GraphResult; if ErrorCode<>grOK then Halt(1); end;
BEGIN assign(f,'c:\dat.txt'); Rewrite(f);
GraphInit; k:=11; {k - частота вынуждающей силы}
repeat {Начало общего цикла}
for j:=1 to N do begin {Начало цикла по j}
port[888]:=2+x; delay(2); port[888]:=0+x; {Звуковой импульс}
if sin(j/k)>0 then x:=4 else x:=0; {Электромагнит}
for i:=1 to N do xx[i]:=port[889]; {Цикл 1}
i:=0;
repeat i:=i+1; y[j]:=i; until xx[i]>120; {Цикл 2}
s:=s+1; writeln(F, s,' ',y[j]); {Запись в файл}
circle(round(j/2),400-round(y[j]/2),2); {Построение точки}
delay(30); {Задержка}
end; {Конец цикла по j}
cleardevice; {Очистка экрана}
until keypressed; {Конец общего цикла}
CloseGraph; Close(f);
End.
При записи в ячейку ОЗУ 888 числа 4 (или чисел 6, 7, 12, 13, 14, 15...), на выводе 4 LPT-порта появляется логическая 1, срабатывает устройство управления 8 и на обмотку электромагнита подается напряжение. Динамик попрежнему вырабатыват звуковые импульсы, сигнал с микрофона преобразуется в цифровой вид и записывается в массив xx[i] (цикл 1): 0000...0111000..000. Каждый раз программа определяет запаздывание сигнала с микрофона по отношению к импульсу, посылаемому на динамик, которое пропорционально координате микрофона, и записывает его в массив y[j] (цикл 2). Результаты выводятся на экран и сохраняются в файле. Частота вынуждающей силы задается величиной k. Алгоритм работы программы:
Проведение эксперимента.
Рассмотренные выше эксперименты могут быть выполнены студентами на лабораторном занятии либо при написании курсовой или дипломной работы. ВВЕРХ
|